Img Source - Lightboard.io
Many real-time location systems (RTLS) require high accuracy of results, up to several centimeters. In such situations, AoA based positioning, whose realization is possible thanks to the Bluetooth® 5.1 technology, comes for help. The Angle of Arrival method provides for the use of not only the signal strength (RSSI) but also the angle of its arrival, which allows calculating the exact location of the object within the range of 0.1 - 1 m. AoA angle of arrival belongs to Bluetooth® triangulation based methods.
Bluetooth 5.1 and Angle of Arrival (AoA)
With the introduction of the Bluetooth 5.1 standard, it became possible to determine the direction of an incoming signal by using the angular phase shifts that occur between antennas when they receive RF signals. To enable AoA, the Bluetooth Direction Finder feature must add a Constant Tone Extension (CTE) to the data packet. Thus, the receiver can sample the IQ components of the signal and determine the phase of the signal. And by doing this for at least several antennas, the receiver can calculate at what angle the transmitter signal is coming.
The Bluetooth core CTE specification says that the CTE packet contains a guard period of 4 µs, a check period of 8 µs, as well as several antenna samples. When receiving a packet containing the AoA Constant Tone Extension, the receiver switches antennas according to a predefined switching pattern. In doing so, the receiver takes an IQ sample every microsecond during the reference period and an IQ sample in each sample slot.

The Minew Aoa Locator has a square shape and consists of 12 antenna elements.

Determining the AoA by sampling phase and switching antennas
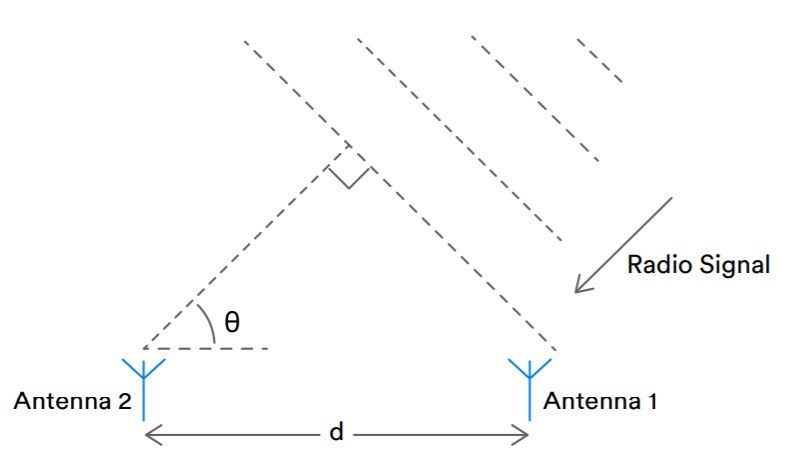
The signal transmitted by the Bluetooth Low Energy device has a frequency of approximately 2440 MHz, which gives a wavelength of 12 cm. In summary, the angle can be calculated using the following formula.
θ = arcsin (ϕλ/2πd)
|
Variable |
Description |
|
λ |
The wavelength of the CTE signal |
|
ϕ |
The phase difference between the antennas |
|
d |
The distance between the antennas |
In practice, however, many problems arise.
Problems in calculating the AoA and their solutions
- The first problem that we encountered was the determination of the angle of arrival from one signal source with the parallel operation of other sources. We just forgot to add parsing by MAC addresses of devices :)
- Then we tried to process IQ samples for one data packet arriving at a frequency of about 10 Hz, which was not enough for a full analysis, and we decided to collect more data in 10 seconds (in practice, 1 second is enough).
- And even after solving these problems, we could not understand where the jumps in the phase difference between random data packets come from. It turned out that they correspond to the switching of the frequency channels on which Bluetooth works (37: 2402 MHz, 38: 2426 MHz, 39: 2480 MHz).
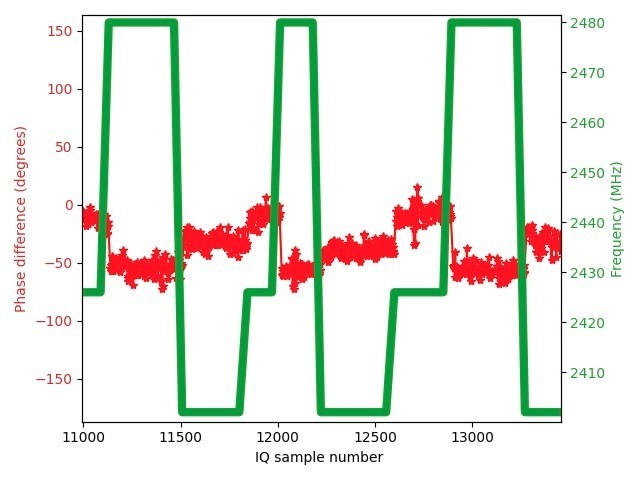
The solution to the problem was the choice of the frequency channel at which the angle obtained from the phase difference has the closest value to the real one.
Experiments
Despite the resolved issues, the phase difference is stable but quite noisy.
Therefore, we decided to use the more accurate MUltiple SIgnal Classification algorithms. The main approach of this algorithm is the decomposition of the covariance matrix of the received signal into eigenvalues. Since this algorithm takes uncorrelated noise into account, the generated covariance matrix is diagonal. Here, the signal and noise subspaces are calculated using linear algebra and are orthogonal to each other. Therefore, the algorithm uses the property of orthogonality to isolate signal and noise subspaces.
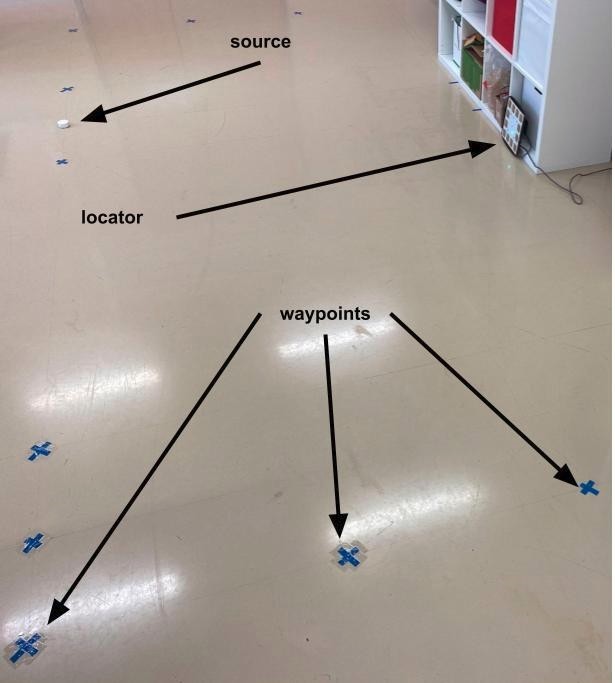
As an experiment, we used a pair of adjacent elements of a linear antenna array (numbered 12 and 1, respectively), with the source located in the following positions marked with blue crosses.
Based on the calculated values, we got the following graph.
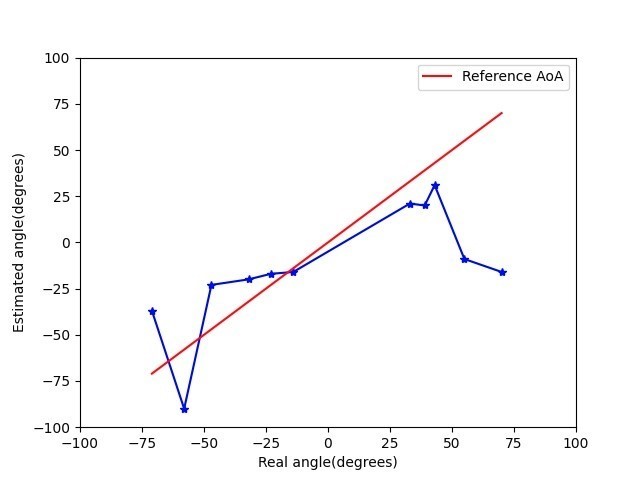
This shows that we cannot get angles of ±90 degrees (we assume this is a hardware limitation). At the same time, the average angular error in the operating range was 12 degrees, which is still a rather bad result.
Then we decided to build a linear regression model and test it on new data taken at the same waypoints and got the following results.
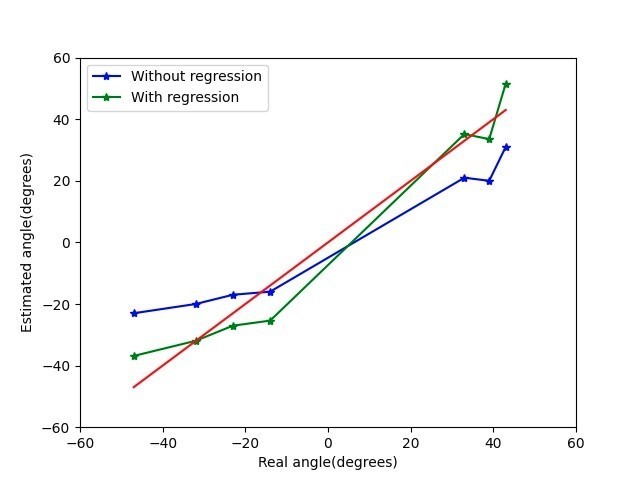
P.S: We also tried 3 antennas, but we got similar results in terms of accuracy. This can be explained by the fact that with an increase in the number of antenna elements used, the main lobe of the radiation pattern narrows. It improves the ability to distinguish one source from another at a given distance BUT does not improve accuracy for one source.
Results
Despite the difficulties encountered, in the end, we managed to obtain an acceptable accuracy of 6 degrees and we can recommend the presented equipment for further use for indoor positioning. In the future, we plan to get a second angle (for this we will take another perpendicular linear antenna array: antenna elements with nomenclature 10, 9) and use both angles (azimuth and elevation) to calculate the XY coordinates.

Navigine SDK
Learn more about the professional Real-Time Indoor Navigation solutions for mobile apps
DISCOVER INDOOR NAVIGATIONThe difference in methods based on RSSI and AoA
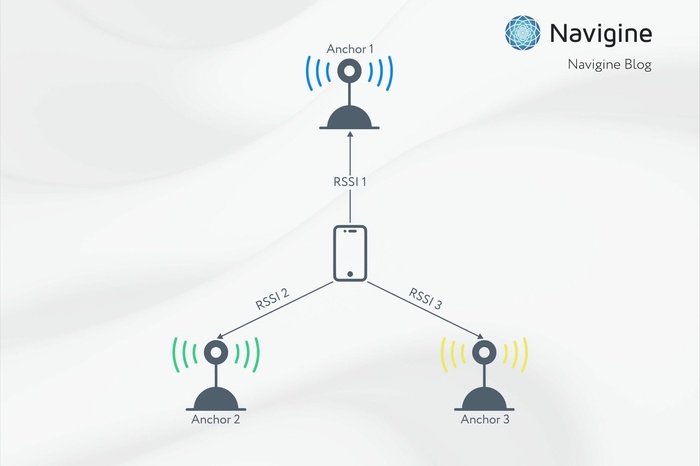
Both RSSI and AoA technologies make it possible to define the location based on Bluetooth® but they differ. While AoA uses the angle of arrival, RSSI functions by measuring the power of the signal that is sent by the transponders placed on the tracked assets. Its performance can be compared with the waves emerging from a stone thrown into the water. At first, they are big but tend to decrease with distance.
Application of local positioning based on Angle of Arrival estimation
The Angle of Arrival positioning increases the performance efficiency of many modern enterprises. The given technology is the most common in healthcare, logistics, and industry.
Logistics and warehousing
The implementation of AoA makes it possible to improve warehouse monitoring and ensure better control over the movement of assets and the staff. Using Angle of Arrival systems, companies can track goods more precisely, follow the movement of the equipment and react timely to emergencies. Moreover, it increases the efficiency of logistics processes and helps the management to optimize warehouse operations.
Industry
Industrial enterprises can use the AoA method for constant control over assets, transport, equipment, and persons. It can also be used for building virtual borders around potentially dangerous zones, which leads to reducing risks of unauthorized access.
Thanks to the high accuracy of geolocation (up to 10 cm), the technology significantly simplifies the dispatch of stock reposition and the support of staff management services. Experience has shown that after using the Angle of Arrival method, labor productivity increases on average by 30%, and the overall cost of indoor navigation infrastructure ownership decreases by 50%.
Healthcare
The usage of Bluetooth® Angle of Arrival in medical institutions can simplify navigation in hospitals and increase customer satisfaction. Indoor navigation based on Angle of Arrival calculation guarantees many advantages:
- makes it easier for visitors to search the necessary room;
- helps to create personalized location-based notifications;
- allows monitoring the movement of equipment, medicines (vaccines), employees;
- helps to track the workload of the hospital staff;
- increases operational efficiency due to improved asset management.
While developing local indoor positioning systems, Navigine makes use of numerous cutting-edge technologies, including the Bluetooth® Angle of Arrival estimation method. The technology implementation allows enhancing the navigation platform and increasing the location accuracy up to 1 cm.
If you are interested in Angle of Arrival, please fill out the feedback form on our website or book a free online meeting.